FARO法如S350三维激光扫描仪在建筑建模的应用
2020-05-04 13:51:44 来源:深圳市鹏锦科技有限公司

法如S350三维激光扫描仪在建筑建模的应用,
项目概况:扫描区域是长春市阳光世家小区,实施项目是小区刚建成竣工,业主单位希望通过对整片小区进行快速的测量,从而快速得到小区内建筑建成后的平面图以及建筑拐点坐标,从而对比设计之初与建成之后的相对偏差,为后期附属设施的建设和布置提供精准的数据参照。并且希望同时获得小区内建筑结构模型,从而传输到数字城市平台完善更新。
项目特点分析
建筑竣工验收一般通过常规仪器便能实现,但仅仅是限于结构不太复杂、建筑结构层次简单的普通建筑。并且如果需要进行三维模型的建立,还需要保证各个建筑结构尺寸的逐个测量。而如果采用三维激光扫描仪进行扫描的话,不仅能快速得到建筑结构的点云尺寸数据,而且能够将点云数据直接输入到常用建筑建模软件进行快速参照建模,便捷快速。
数据获取
扫描作业前的准备
本次扫描是为实现9栋居民楼进行立面图绘制和建模而进行了,为了达到要求目的,必须顺利采集9栋房屋的完整点云数据,并使得房屋点云能够有效、精确的进行拼接,并且减少架站点的个数,我们做了以下安排和准备,
扫描工作至少准备以下:
1.扫描仪 1台
2.木质三角较 1个
3.人员配备 2人
作业详细步骤
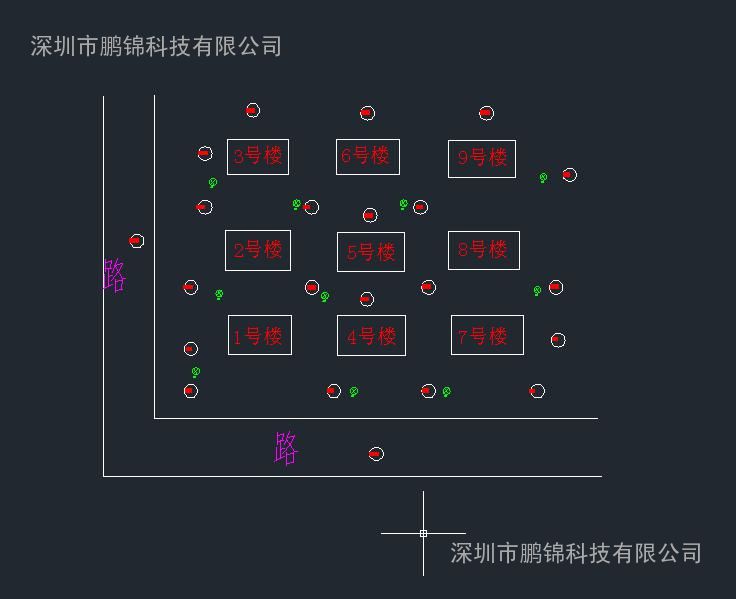
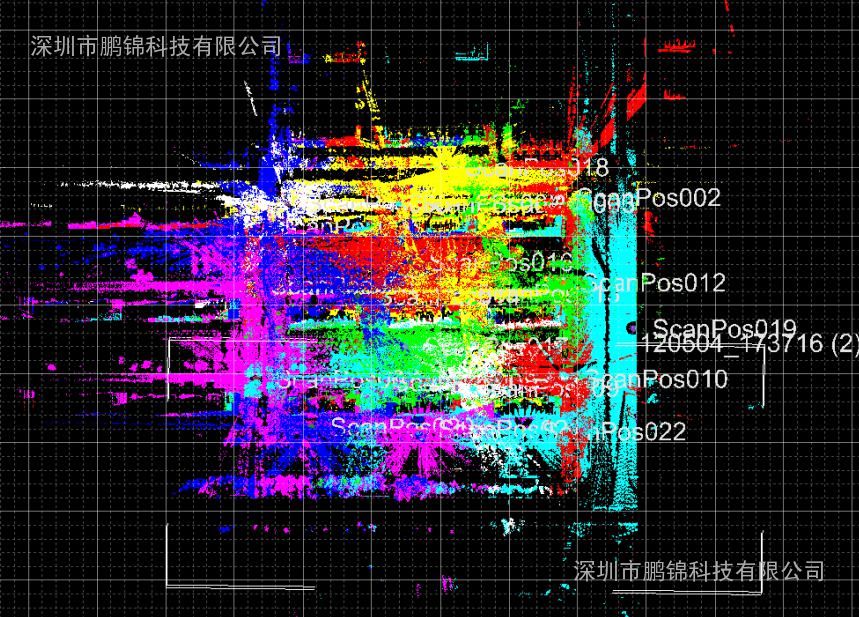
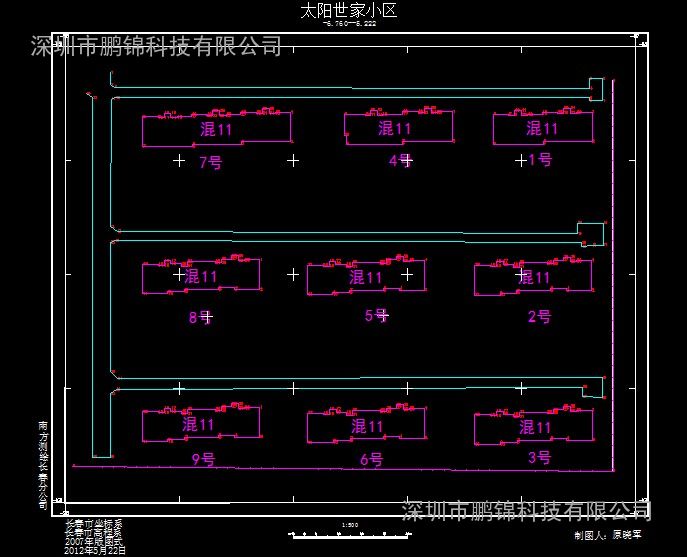
根据测试要求,根据所提供的控制点个数和位置,为了更好的在点云上反应小区完整的信息,便于模型的建立,我们根据后方交会的原理,一共架设了22站,站点(圆圈)和控制点(绿色)的位置分布图如下。如图1-1
图1-1
图1-1,红色原地分别为我们架设仪器位置,每一站我们都选择尽可能多的反应房屋内容或者重点需要表达的部位,站点之间我们需要至少2个控制点,我们这次把标靶摆放在控制点上,标靶正对着扫描仪,这样在扫描仪精扫标靶的时候扫描到尽可能多的点,降低拟合标靶中心位置的误差,并且标靶放置在尽量离扫描仪远的位置,这样在坐标转换的过程中也把坐标转换误差降低到*小。
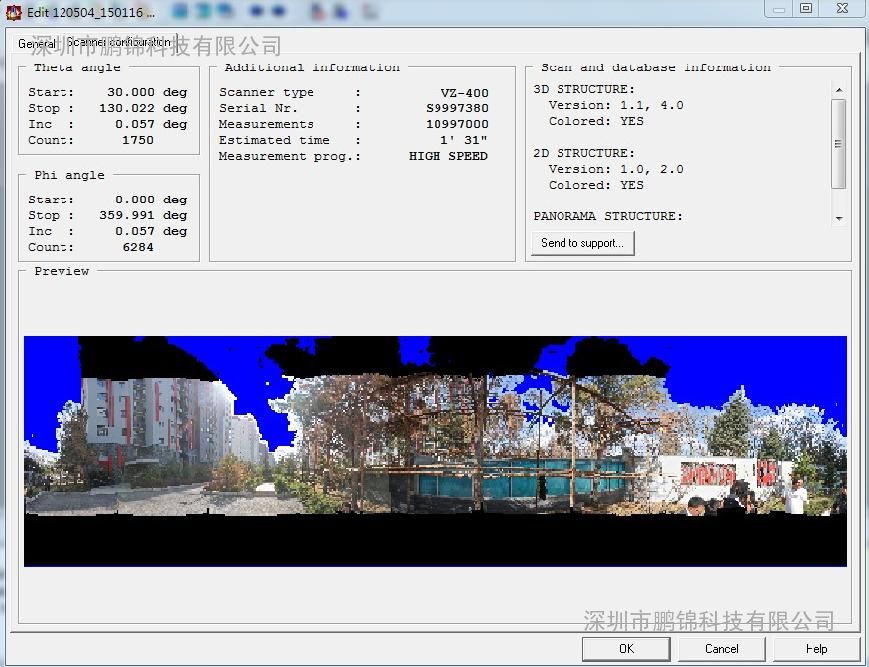
每秒可以扫描30万个点,根据工程要求,我们选择每站扫描1分31秒钟,接受扫描点数10997000个。扫描到柱子上的2个点的平均间隔大概15mm,多站拼接后点的间隔大概在10mm。如下图
图1-2
这样2个人操作扫描仪,每站作业时间大概10分钟就能完成。
标靶中心坐标的获取
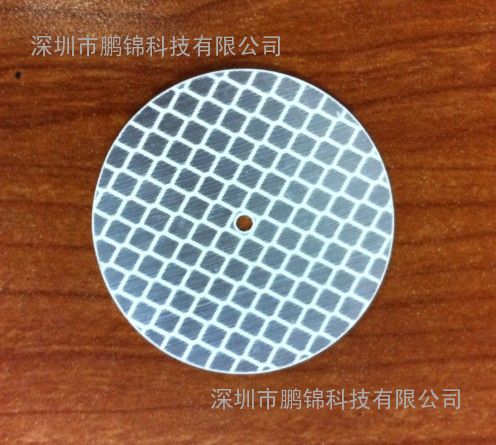
这次测量用的标靶是原装的反射片,标靶在扫描仪间基本是通用的,是用一种反射率比较高的材料做成。
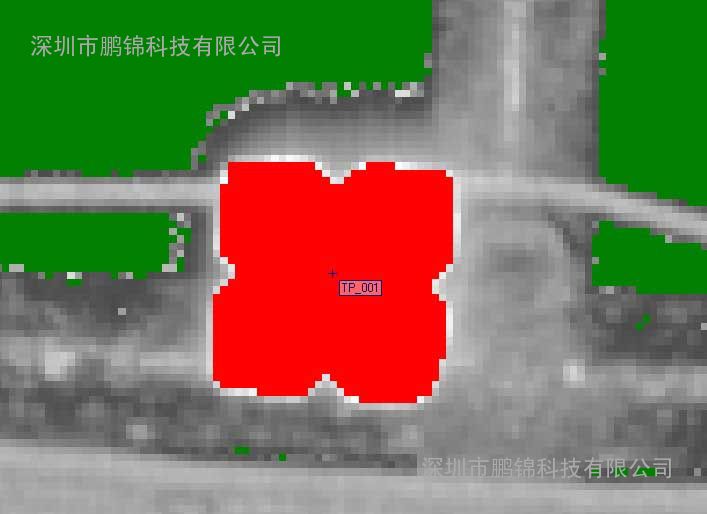
扫描仪旋转一周后,我们在PC上通过软件找到扫描点云反射率90%以上的物体,因为现实中很少有反射率这么高的物体,所以找到的就是标靶,扫描仪会精细扫描标靶,在这个标靶上会扫描4000个测量点,通过这4000个点拟合出来标靶的中心,如果标靶是圆形的,则拟合出来标靶圆心。(如图1-4)图中的“+”字中心即为软件自动拟合出来的标靶中心。用全站仪获取标靶的中心坐标,只需望远镜对准标靶的中心即可。
图1-3 反射片
图1-4
数据预处理
数据的坐标转换与拼接
把全站仪采集的标靶的数据导出来,在Excel里编辑成(E N Z)格式的数据,在以.csv的数据格式保存下来。
标靶数据导入软件,在软件的左边树状菜单栏下面有个选项(GLCS代表大地坐标系统),双击打开,里面有个如图导入特征点数据的选项。我们把全站仪测得的标靶的坐标导入到软件中。
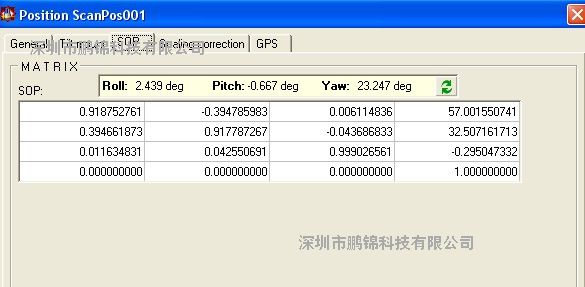
我们一共扫描了22站,每站周围贴2个。扫描仪扫描的时候会以激光发射中心做为坐标原点,起始方向做为X轴建立自己的坐标系(SOCS),即扫描仪坐标系,我们扫描的站点是互不关联的,现在我们就是把扫描仪扫描的标靶的坐标符合到全站仪使用的坐标系中。这些特征点符合好了,那么所有的点都转换到全站仪使用的坐标系中了。
把扫描仪扫描的坐标系导入到软件以后,使用后视方法,软件就会自动的解算相关位置,等结算完,坐标也转换了。如下图所示:
图2-1
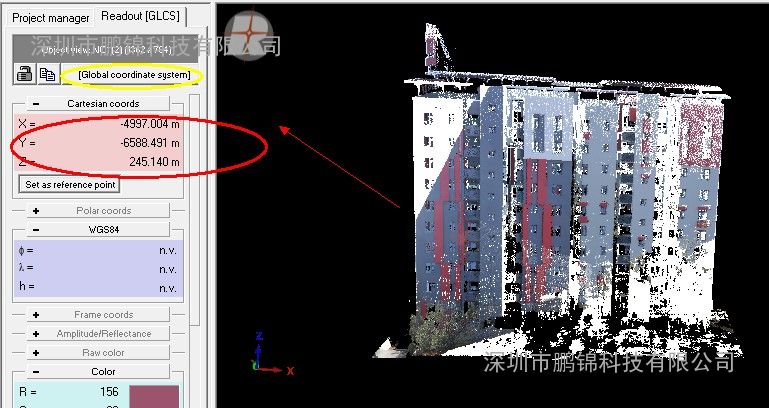
图2-2具有大地坐标系的三维点云图,任一点都具有真实的大地坐标
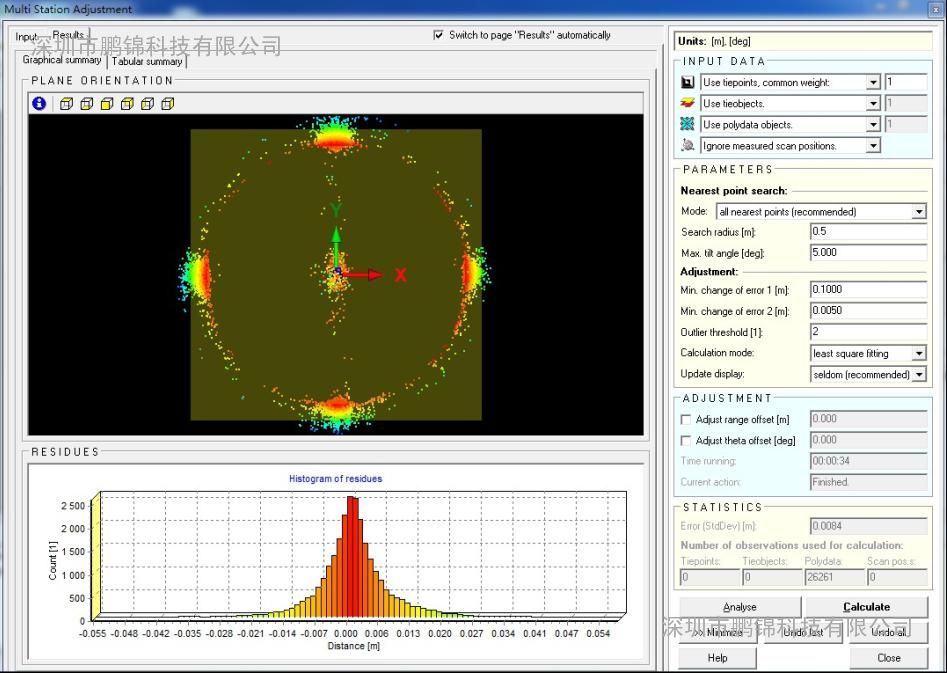
同样,我们可以用自动校准模块来多点云进行更详细的拼接,用以提高精度,拼接结果如下图所示:
图2-3
22站都转到了同一坐标系下,即4站也拼到了一起,如图2-3。当然拼图方法还有其他方式,如下:
1.通过两站间的共同标靶拼接。2.通过软件的GPS模块自动拼接。
3..根据测量的共同点手动拼接。4.导入到第三方软件进行拼接。
图2-4全部点云俯视图
图2-5彩色点云俯视
赘余点删除
扫描仪把它自己“看”到的实体都会扫描下来,这样扫描完后必然会有一些赘余数据,我们可以根据不同的需求选择性的去过滤一些数据或者去人工删除一些数据。
我们这次任务主要是获取9栋建筑物,所以我们就可以选择性的保留下来9栋建筑物的点云数据,把其他的多余点删除。手动删除方式和CAD软件上选中点,delete键删除相同。除此之外,软件还有其他多种过滤方式:如下
- Range gate(距离过滤):用户可以保留距离扫描仪指定距离范围内或外的点。
- Remove isolated points(孤点过滤):如果一个点在指定的距离内没有其他扫描点的存在,那么这个点被称为孤立点,而被保留或删除。
- 2.5D raster (光栅过滤):此种过滤用于地形测量时树木等高于地面的地物的过滤
- Point filter(step:X)随即过滤:即点云保留原有个数的1/X。
我们此次保留下的数据如图2-6,2-7,2-8.
图2-6单栋建筑物点云图
图2-7单栋建筑物点云图(贴纹理)
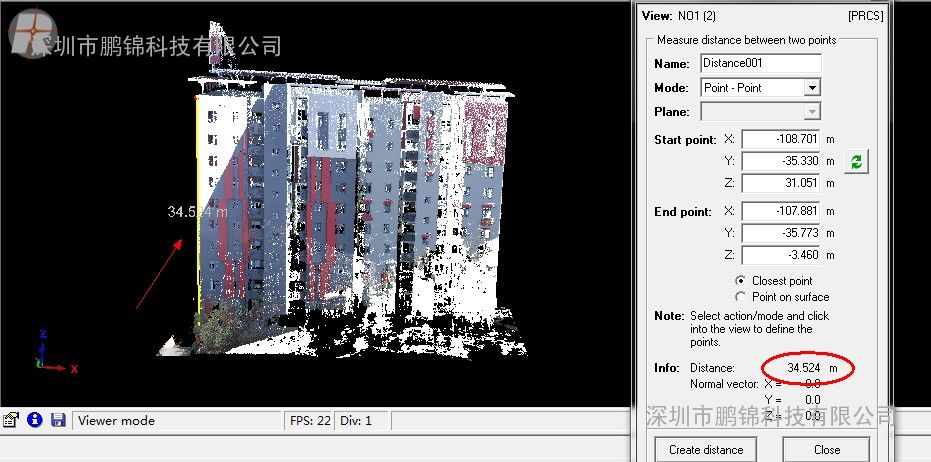
图2-8 三维点云图上可进行实际量测
数据整理和成果展示
数据的详细加工
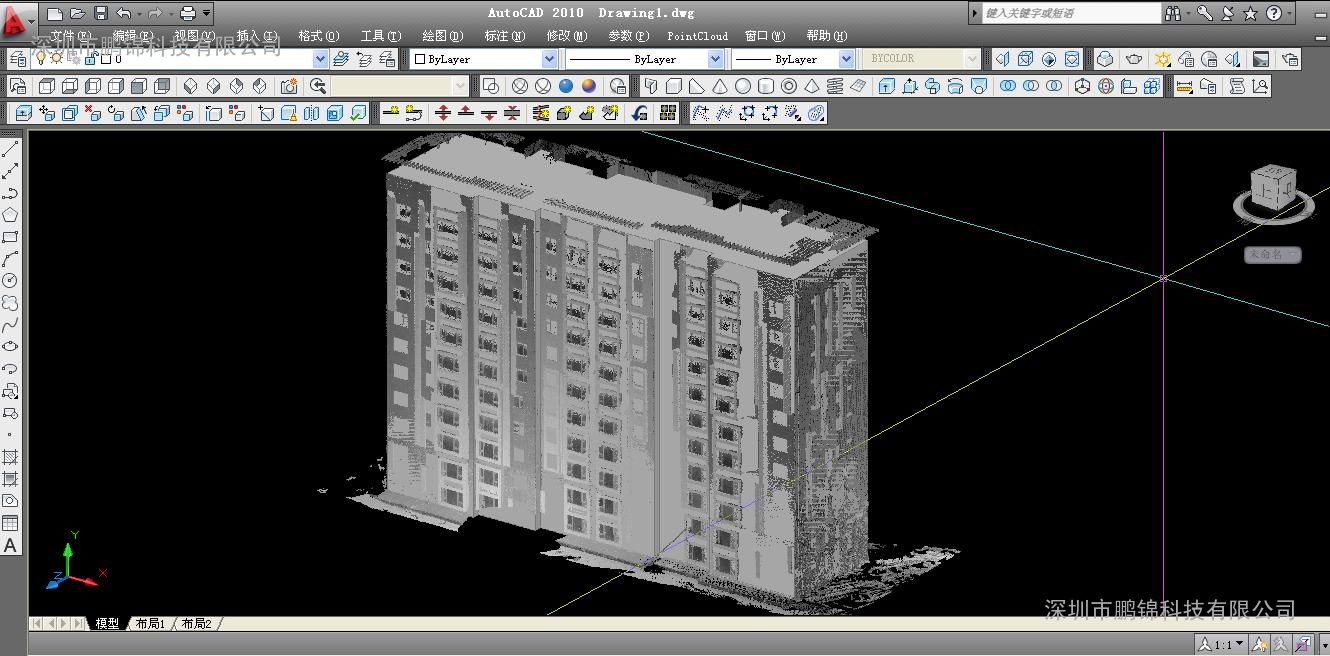
利用过滤后的点云进行加工,我们将点云导入CAD之中,使用相关控件,直接在点云上对房屋进行模型建立。
图3-1
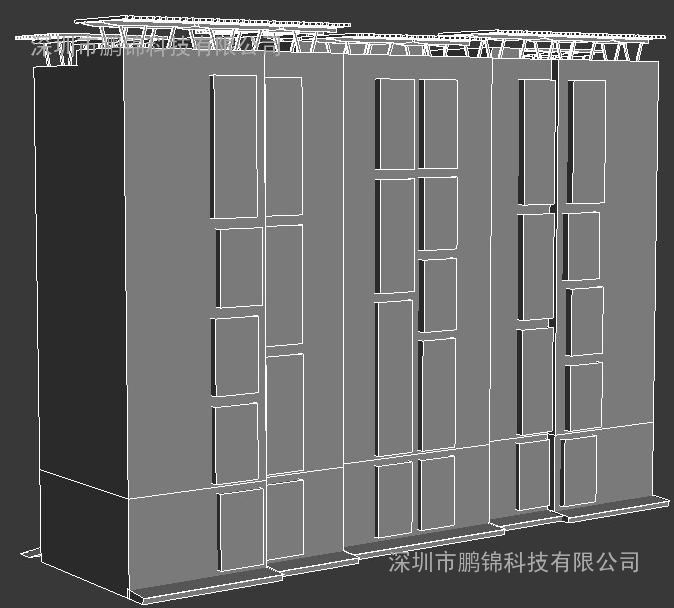
导入CAD之后,使用pointcloud控件,能够直接在点云上建立面片和房屋整体模型。
图3-2
(利用CAD中的KUBIT插件,根据导入的楼体点云数据,直接建立的白模)
图3-3
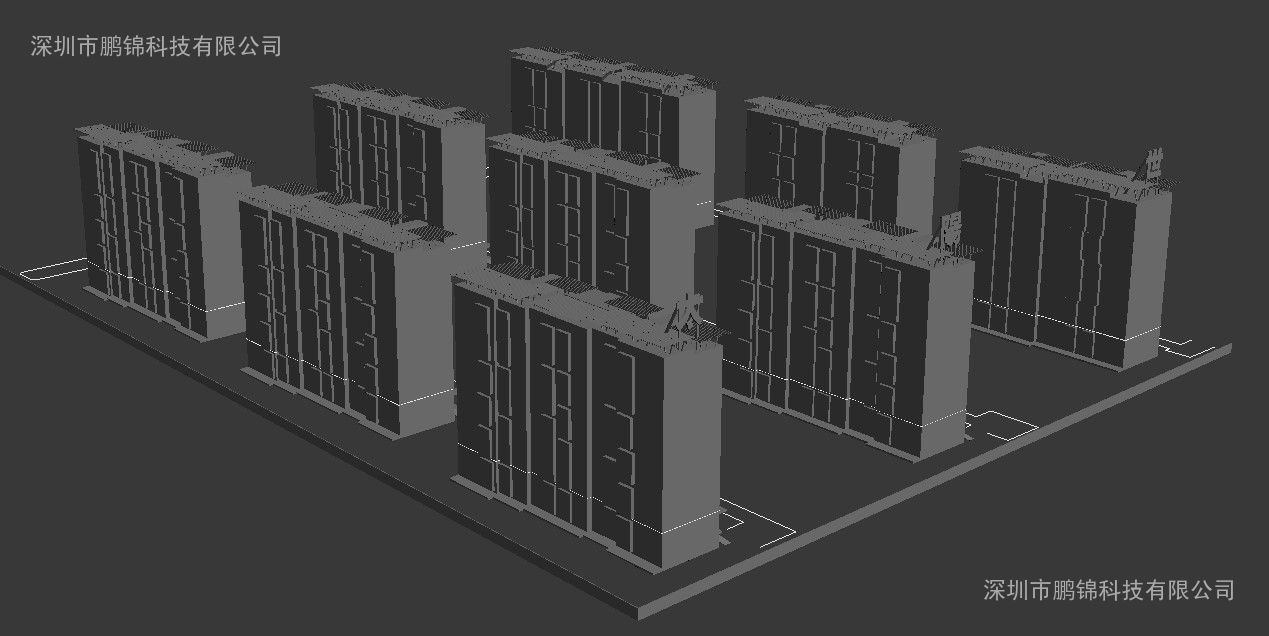
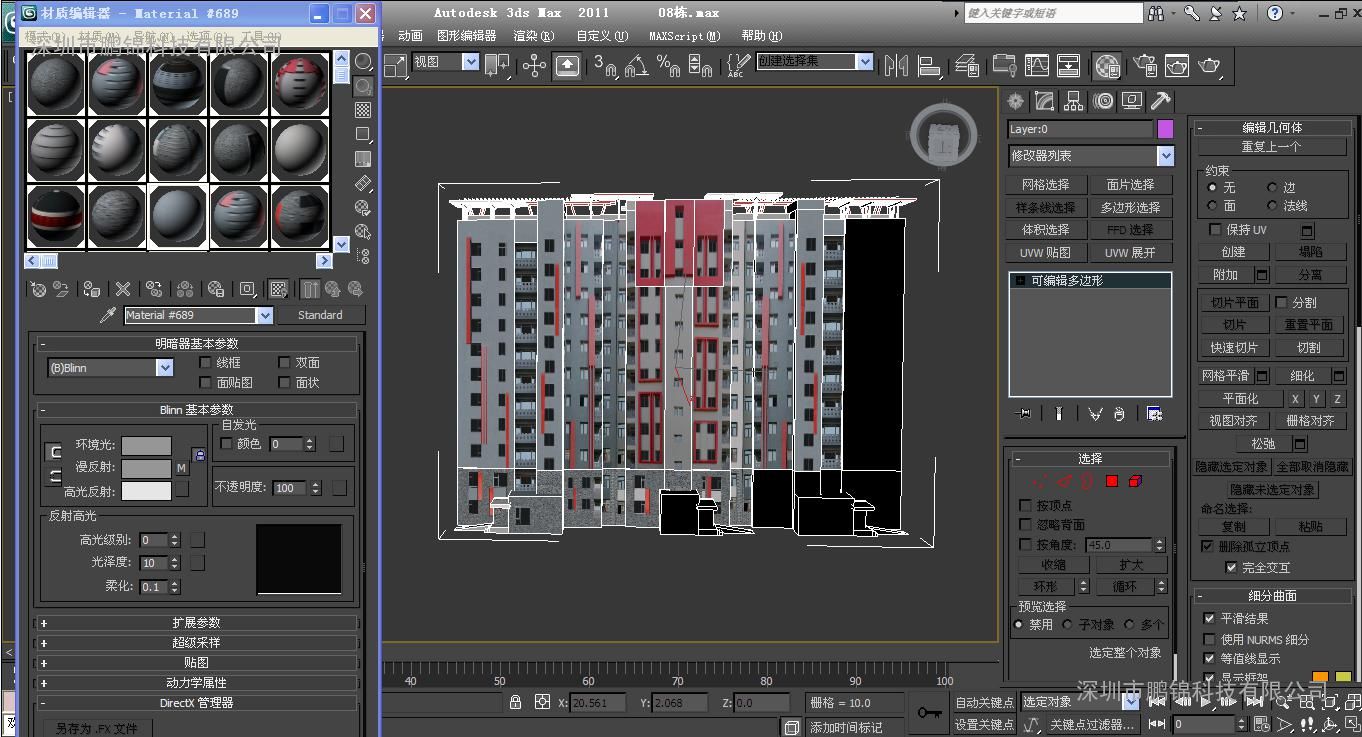
利用3D-MAX软件,为建立好的模型贴纹理,使得效果更佳的逼真。操作界面如下图所示:
图3-4
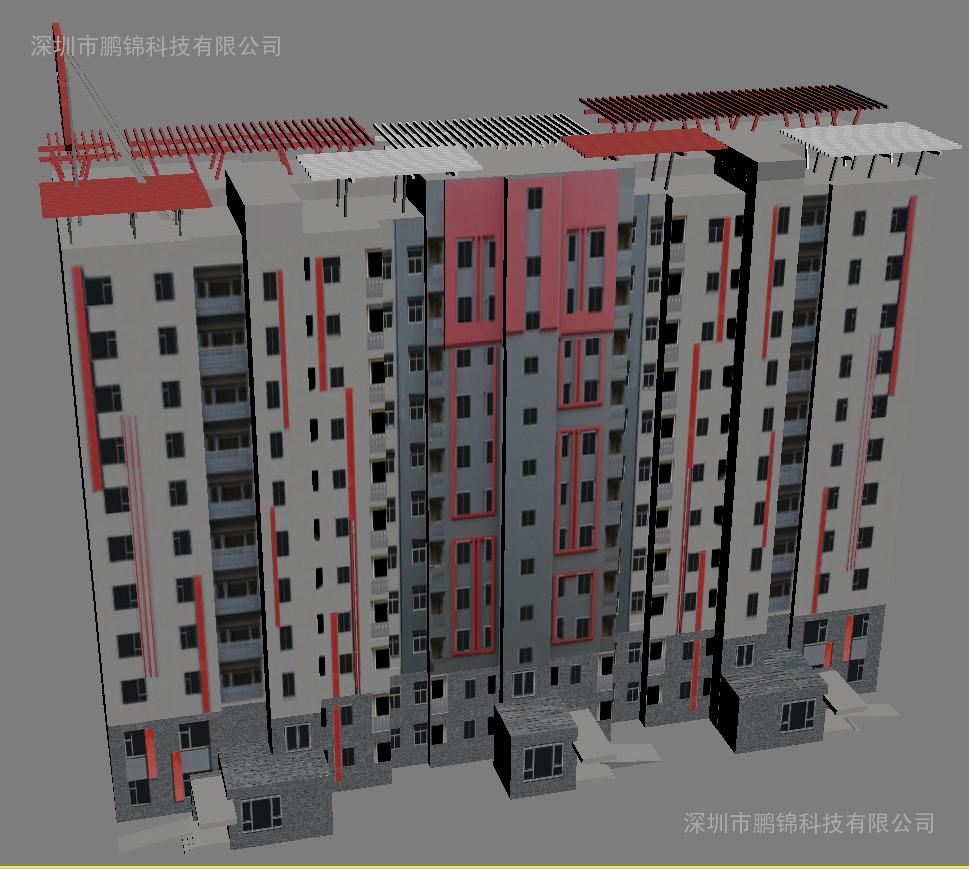
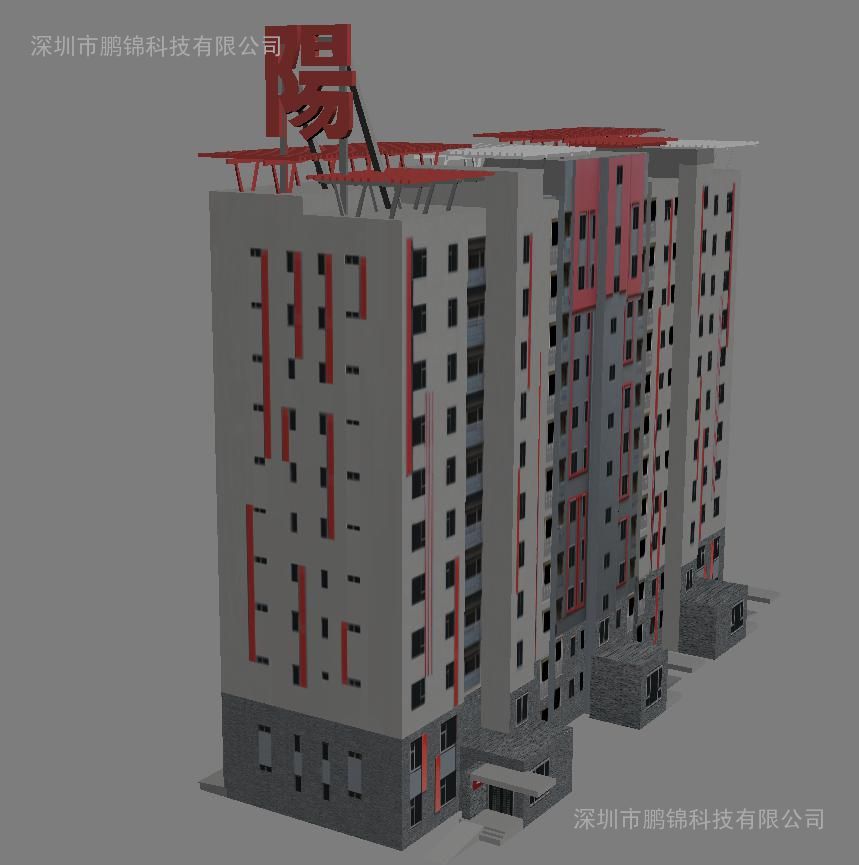
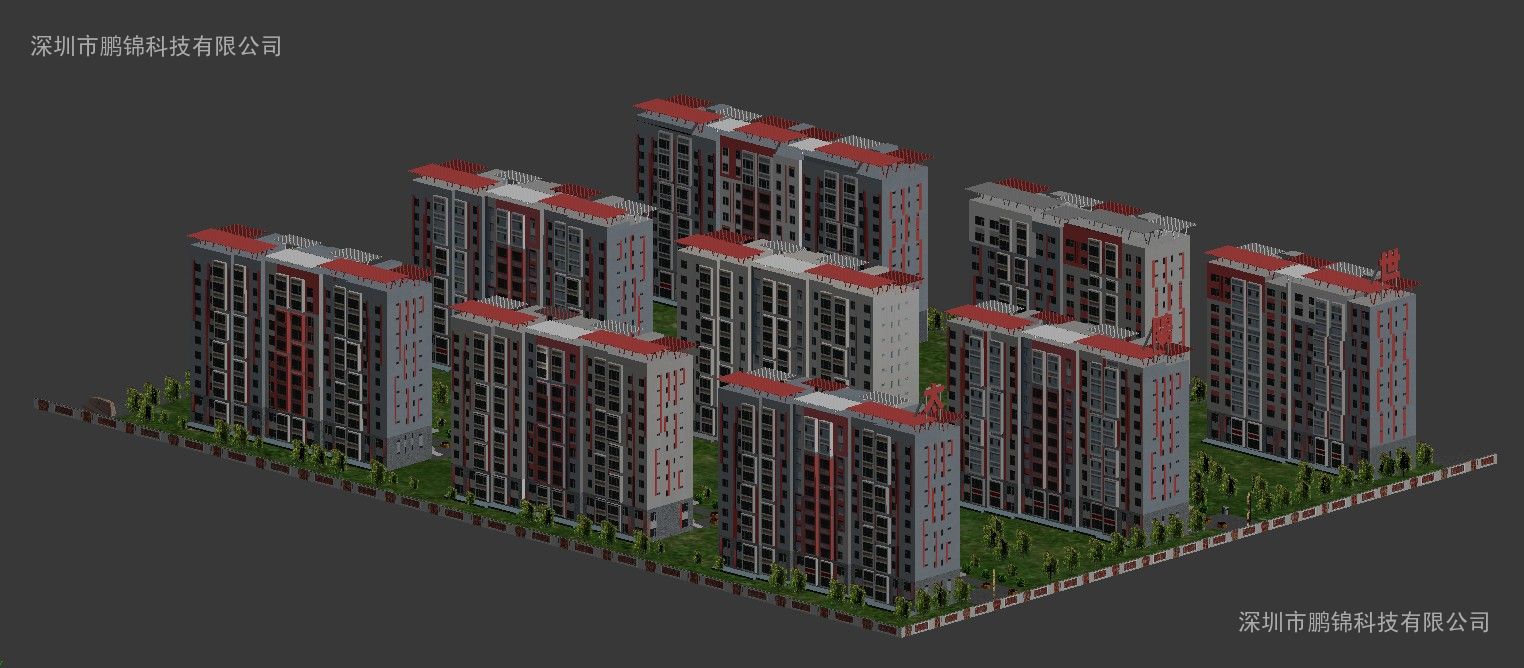
经过整个完整的操作流程之后,附有色彩信息的三维立体模型就可以顺利进行展示了。结果如下图所示:
图3-5
图3-6
图3-7
图3-8
图3-9太阳世家小区总体平面图(1:500)
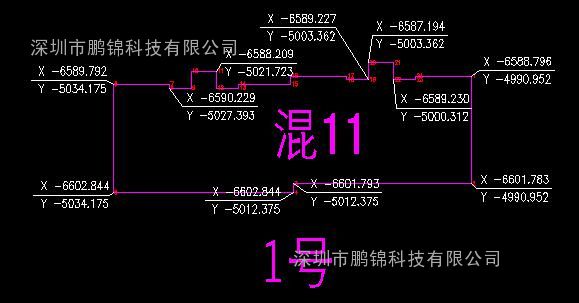
图3-10 1号楼部分拐点的大地坐标(不带高程)
项目功能及应用范围解析
通过三维激光扫描仪对整个建筑群的扫描,不仅可以得到小区内的实际尺寸点云数据,并且能通过软件的力量进行快速的三维建模工作,从而得到相应的三维模型数据,拥有模型数据后便能提取任意的二维线画图资料。
建筑建模是三维激光扫描仪的一大主要应用方向,扫描仪的特性决定了应用于建筑扫描将非常得心应手,因为无论多复杂的建筑结构扫描仪都能完整细致地将每个建筑细节真实得从点云数据的角度反映出来,而且精度范围可控,加上现今建模软件越加趋于完善,尤其针对三维点云建模的软件和插件层出不穷,对三维扫描仪应用于建筑建模方面提供了强大的后援支持。一般应用行业集中于建筑验收、旧城改造项目、装饰装修和数字城市。
法如S350三维激光扫描仪在建筑建模的应用,
 扫一扫,手机浏览
扫一扫,手机浏览